Rocket Flight Controller
Project Objective: Achieve rocket attitude resolution, utilize PID control to adjust the servo motor’s rotation angle. The servo motor pulls the nozzle to alter the thrust direction, thereby correcting the rocket’s attitude and ensuring vertical ascent.

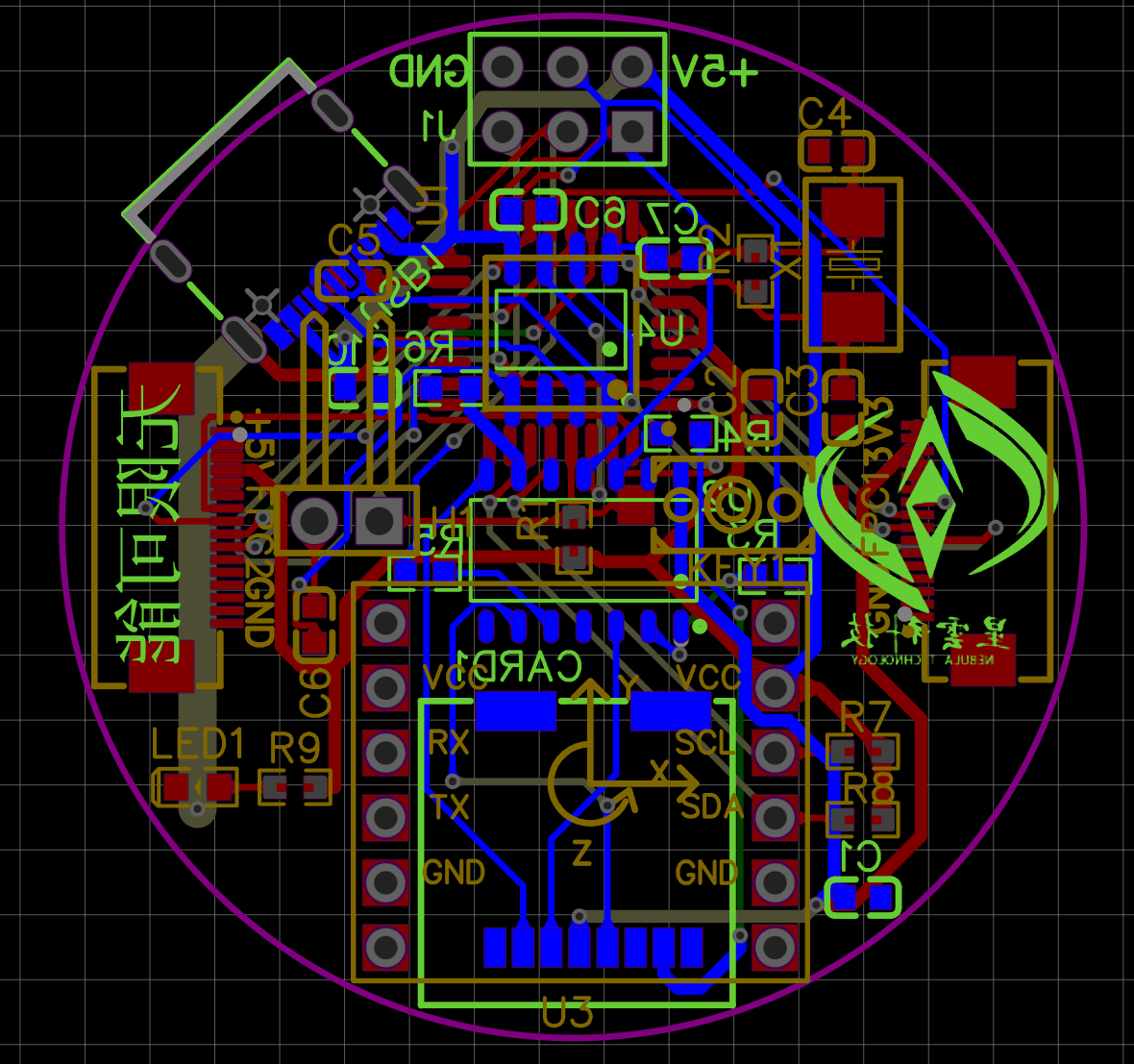
The flight control unit (FCU) utilizes an Atmega328P as the main controller, with future plans to upgrade to an RP2040. The power supply and main control boards are designed as separate modules to prevent main controller burnout caused by instantaneous current surges.
Simultaneously, the FCU integrates an SD card slot for convenient flight log recording, facilitating troubleshooting of potential failures.
A JY901B attitude sensor is employed to acquire real-time altitude, attitude, and acceleration data.
The FCU incorporates Kalman filtering and PID control algorithms to minimize errors and maintain vertical ascent control.
Additionally, the system integrates a GPS module and Zigbee data transmission module for real-time communication with the ground-based “Anonymous Host Machine” to obtain rocket attitude information.
Inter-layer connections utilize FPC (Flexible Printed Circuit) cables to enhance stability and prevent short circuits or bad contacts.