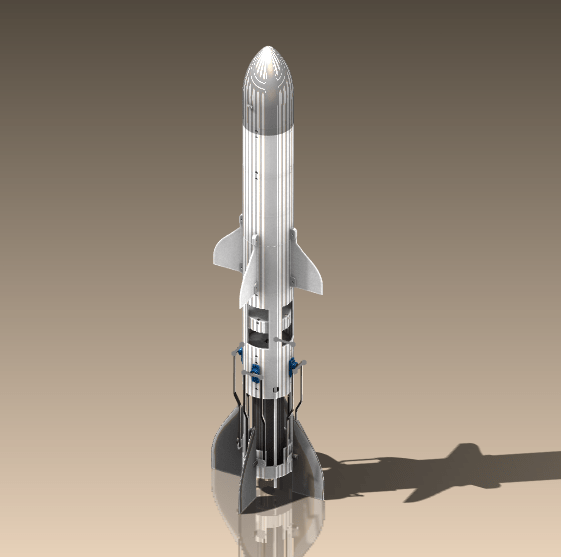
Two-stage Rocket
Project Objective: Achieve rocket attitude resolution via PID-controlled servo actuation of canards, enabling mission-critical launch data recording and attitude control to ensure successful recovery.

Utilizing our proprietary RP2024 flight controller for vertical ascent control, autonomous stage separation, onboard data logging, and partial telemetry downlink.
Propulsion employs KNSB or RAP propellants, with primary airframe assembly executed by NebulaTech’s snap-ring assembly machine.
The rocket body is additively manufactured in PLA polymer.
Anticipated altitude envelope: 1,200-1,500m ASL.