一、结构上:
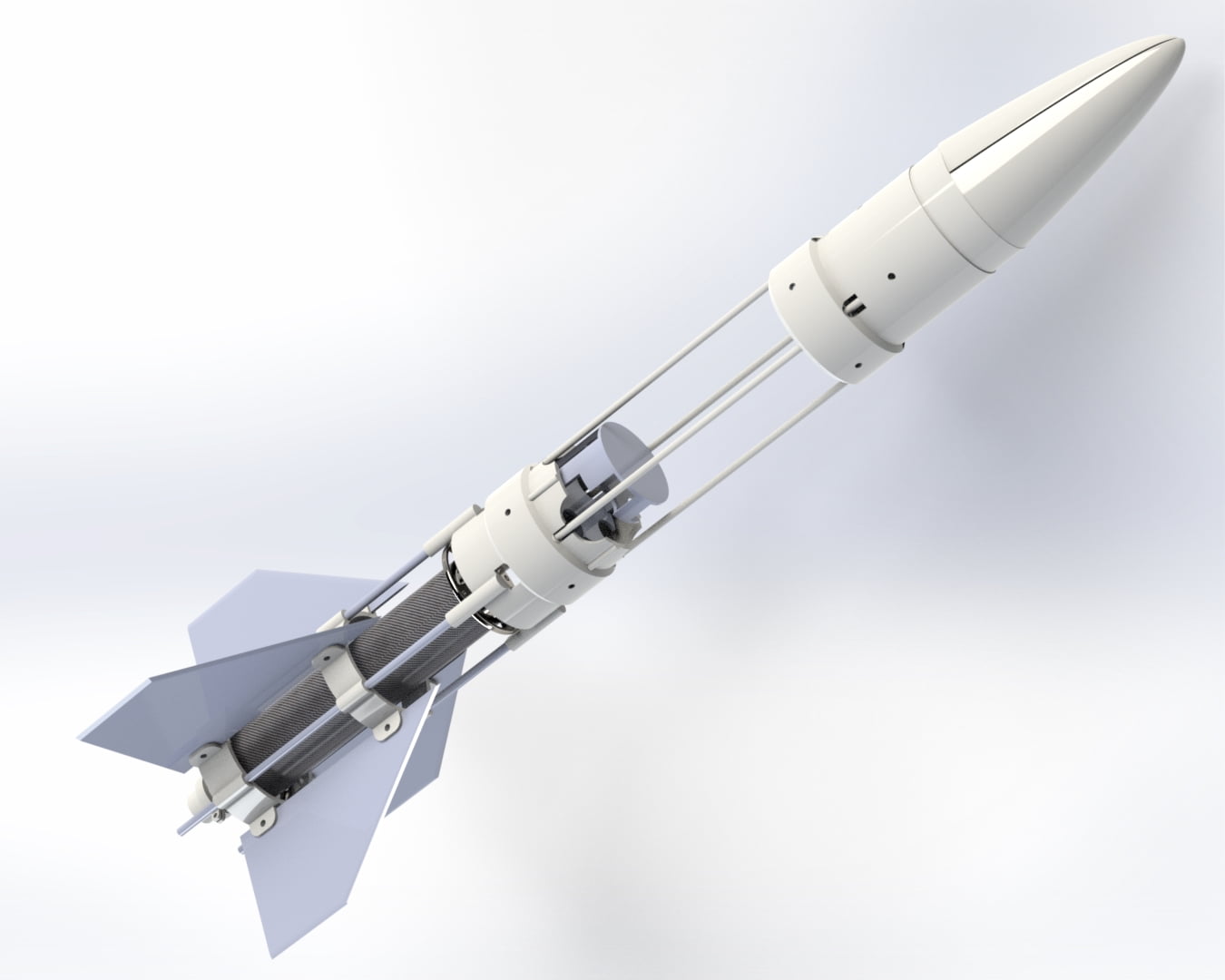
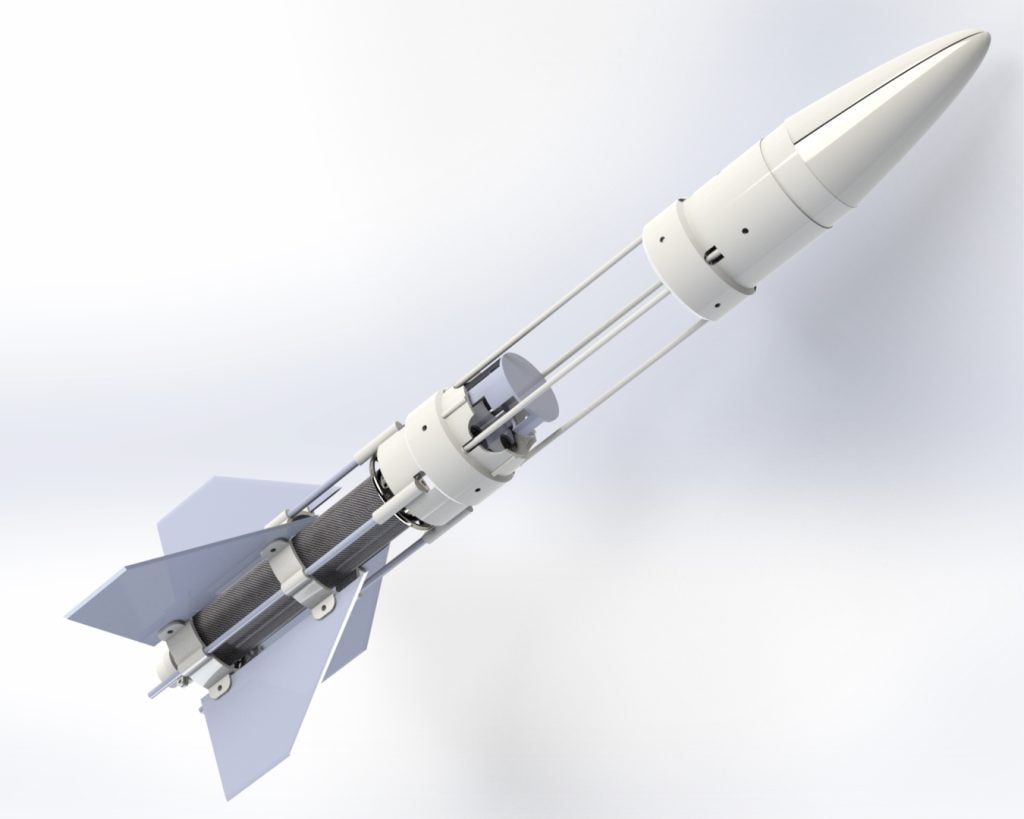
第二代矢量火箭结构上与第一代类似,我们团队成员在第一代的基础上做了一些微调,其中包括消除打印机误差等,具体误差值视打印机而定。
二、硬件上
第二代矢量火箭为了保证箭体结构整体比较和谐,不再出现“外挂主控”的情况,我们采用了体积更小、算力更强的Seeeduino XIAO开发板作为主控,开发板的引脚定义如图2-1所示,同时我们继续采用MPU6050姿态传感器。

图2-1 Seeeduino XIAO开发板引脚定义图
为了确保飞控的稳定性,我们绘制了PCB,PCB需要外接5V供电,同时需要将MPU6050和Seeeduino XIAO焊接在正反两面,以确保能放进箭体中,PCB示意图如图2-2所示。

图2-2 PCB布线示意图
三、软件上
这次不同于一代简单的map映射,我们采用了卡尔曼滤波算法对MPU6050回传的四元数进行解算,以获得准确的实时火箭姿态,然后配合PID控制舵机转动,从而控制火箭的姿态。
Github开源地址:https://github.com/baimo0001/vector_rocket2.0
百度网盘获取地址:https://pan.baidu.com/s/1hnn4L2h-VMInzWUaSX2MPg?pwd=8mgd
如果在代码和硬件组装上遇到任何问题,欢迎登录星云科技社区进行反馈,社区地址:https://bbs.nespace.cn,我们团队成员将时刻提供解答帮助。
最后,感谢大家对星云科技团队的大力支持,大家的支持是我们团队进步的最大动力,期待我们下一步的开源计划吧!
Related Posts
星云科技相关资源链接(持续更新)
1.主站:www.x...
今天,我们实现了一个来自2021年的梦想——星云科技矢量火箭制作流程及开源计划
完成2021年提出的矢量火箭项目的具体过程,以及项目的开源计划,供各位爱好者批评交流。
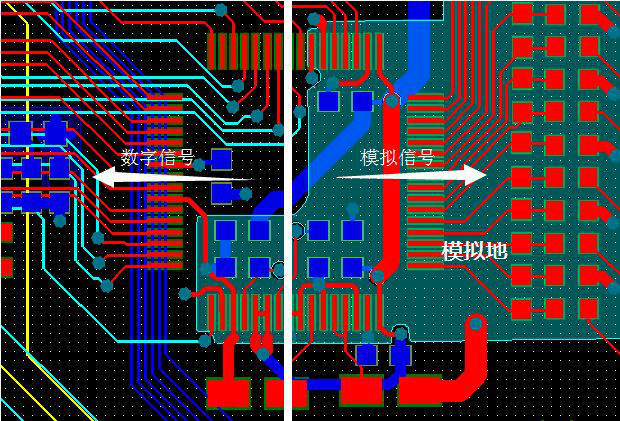
PCB设计时要注意的一些问题
1.关于模数分地的问...