
星云科技作为火箭爱好者团体,为了推进有控火箭的普及以及尽可能让更多的爱好者参与进来,特此开源矢量控制火箭的代码和图纸,开源计划如下:
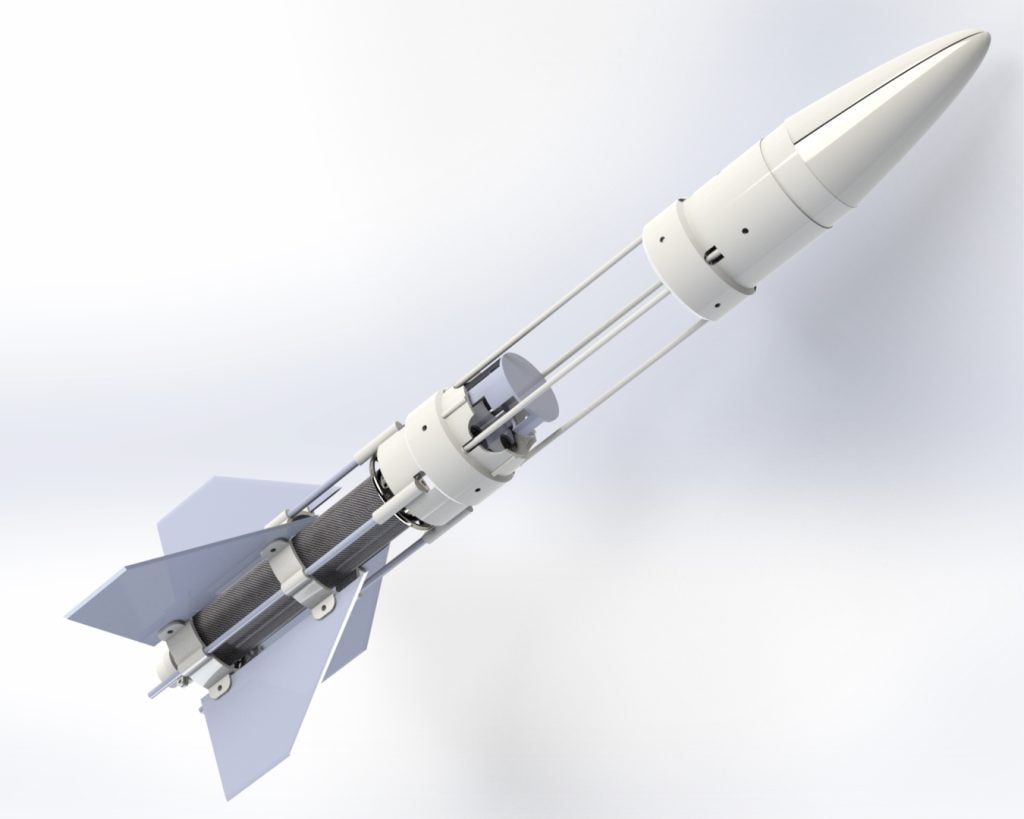
第一代矢量控制火箭:
1.代码部分
#include <Adafruit_MPU6050.h>
#include <Adafruit_Sensor.h>
#include <Wire.h>
#include <Servo.h>
Adafruit_MPU6050 mpu;
int x = 0;
int y = 0;
int z = 0;
Servo servo1;
Servo servo2;
Servo servo3;
Servo servo4;
int value = 0;
void setup(void) {
Serial.begin(115200);
// 尝试初始化
if (!mpu.begin()) {
Serial.println("Failed to find MPU6050 chip");
while (1) {
delay(10);
}
}
Serial.println("MPU6050 Found!");
// 将加速度计范围设置为 +-8G
mpu.setAccelerometerRange(MPU6050_RANGE_8_G);
// 将陀螺仪范围设置为 +- 500 度/秒
mpu.setGyroRange(MPU6050_RANGE_500_DEG);
// 将滤波器带宽设置为 21 Hz
mpu.setFilterBandwidth(MPU6050_BAND_21_HZ);
delay(100);
servo1.attach(8);
//servo2.attach(6);
//servo3.attach(5);
servo4.attach(6);
servo1.write(90);
servo2.write(0);
servo3.write(0);
servo4.write(90);
}
void loop() {
/* 使用读数获取新的传感器事件 */
sensors_event_t a, g, temp;
mpu.getEvent(&a, &g, &temp);
////acceleration就是加速度的意思///
x = a.acceleration.x;
y = a.acceleration.y;
z = a.acceleration.z;
Serial.print(x);Serial.print(" ");
Serial.println(y);Serial.print(" ");
Serial.println(z);Serial.print("\n");
if (x < 10 && x > 0 && y < 4 && y > -4){
Serial.println("up");
value = map(x, 0, 10, 0, 180);
servo1.write(value);
Serial.print(value);
}
else if (x > -10 && x < 0 && y < 4 && y > -4){ //2
Serial.println("down");
value = map(x, -10, 0, 180, 0);
servo1.write(180-value);
Serial.print(value);
}
if (y < 10 && y > 0 && x < 4 && x > -4){ //3
Serial.println("Right");
value = map(y, 0, 10, 0, 180);
servo4.write(180-value);
Serial.print(value);
}
else if (y > -10 && y < 0 && x < 4 && x > -4){
Serial.println("left");
value = map(y, -10, 0, 180, 0);
servo4.write(value);
Serial.print(value);
}
}2.结构部分:
链接:https://pan.baidu.com/s/1KOF_xN1g44SiT1ISCOHRIQ?pwd=r1ll
提取码:r1ll
3.注意事项:
(1)1.0程序不能使用上位机,未直接获取欧拉角
(2)1.0版本程序利用加速度进行姿态解算,此程序为4舵机版本,可以修改成两个舵机
(3)本图纸需二次修改才能正常使用,部分结构存在问题
(4)最终解释权归星云科技所有
Related Posts
星云科技相关资源链接(持续更新)
1.主站:www.x...
星云科技第二代矢量火箭开源计划
一、结构上: 第二代...
今天,我们实现了一个来自2021年的梦想——星云科技矢量火箭制作流程及开源计划
完成2021年提出的矢量火箭项目的具体过程,以及项目的开源计划,供各位爱好者批评交流。